This robot spider could one day be used in medical procedures
Mumbai, August 31: Roboticists are envisioning a future in which soft, animal-inspired robots can be safely deployed in difficult-to-access environments, such as inside the human body or in spaces that are too dangerous for humans to work, in which rigid robots cannot currently be used.
Known as MORPH (Microfluidic Origami for Reconfigurable Pneumatic/Hydraulic), the process uses soft-lithography to first create the robot shape entirely from silicone. Laser micro-machining is then used to etch tiny channels into the robot’s body.
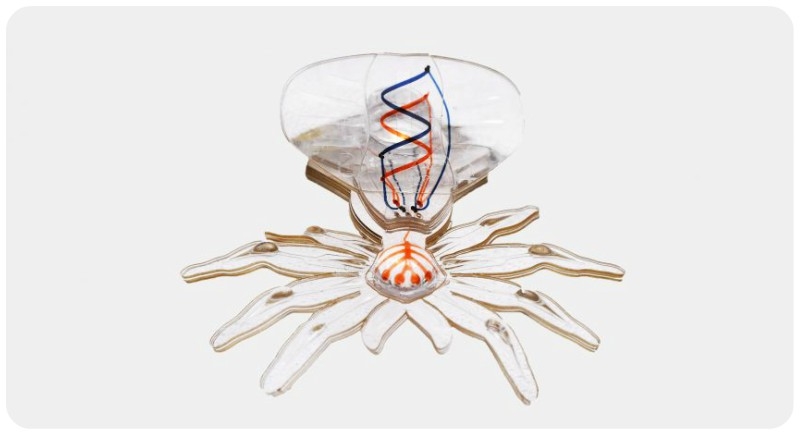
Using a technique called injection induced self-folding; some of these channels are then pressurized and cured using resin and UV light to form the final robot shape. Other microfluidic channels remain open so that the robot’s limbs can be actuated using water, coloured in this instance to mimic the appearance of the Australian peacock spider. The work is published in Advanced Materials.
“The smallest soft robotic systems still tend to be very simple, with usually only one degree of freedom, which means that they can only actuate one particular change in shape or type of movement,” said study co-author Sheila Russo, a Postdoctoral Fellow in Robert Wood’s group at Harvard’s Wyss Institute and the John A Paulson School of Engineering and Applied Sciences (SEAS), and currently Assistant Professor at Boston University.
“By developing a new hybrid technology that merges three different fabrication techniques, we created a soft robotic spider made only of silicone rubber with 18 degrees of freedom, encompassing changes in structure, motion, and colour, and with tiny features in the micrometre range.”